阅读:0
听报道
撰文 | 崔昊天
责编 | 程 莉
老电影《摩登时代》中有一个经典的镜头,卓别林每天不停歇地在生产流水线上扭紧一个个六角螺帽,最后他的眼睛里只剩下一个个六角螺帽,看到什么都要去扭一扭,最终疯狂。这一幕描绘的是20世纪30年代的美国工厂。如果他生活在现在,自然不会发疯,因为高精度机器人已经不仅仅能做到精确地扭紧螺帽了。
用钻头钻透鸡蛋壳而蛋膜完好无损,刺穿覆在气球上的薄纸保证气球不破……这些“不可能的任务”需要超乎常人的稳定、精确,以及敏捷的反应。本周《机智过人》的节目现场,代表机器智能的协作机器人和最富经验的人类高级钳工一起面对挑战,他们能成功吗?
心细如发——高精度机器人
时至今日,我国有些精密的武器弹药依然需要人工做最后的校准,以保证结构的精确性。来自军工企业的高级钳工张新停师傅,就是这样一位“给子弹立规矩”的人。把钻头当绣花针用是他每天的工作,因为精度要求最高的部件,要把误差控制在千分之一毫米。手工打磨一个满足如此要求的部件,一位高级钳工需要一个月的时间。

为了在高精度加工中提升工作效率,辅助人工甚至替代人工,需要精密数控机床和高精度的机械臂。在《机智过人》节目现场出现的小i机器人,即是一种高精度的双臂协作机器人,每条机械臂有六个自由度。
自由度是什么呢?机械臂的自由度(Degree of Freedom)用来描述机械臂动作的灵活性,与能够独立运动的关节数目对应。目前工业机器人采用的控制方法通常在机械臂的每一个关节轴处安放一个独立的伺服电机,因此“轴数”越多,代表了机器人的运动越灵活自由。小i是一种六轴机器人,即拥有六个自由度,可以实现横向,纵向,垂向三个方向的移动以及三个方向的姿态角。因此在机械臂的活动空间内,六自由度的机械臂可以按任意指定方向到达指定位置,满足各种运动需求。
协作机器人又是什么呢?我们知道,大部分工业机器人是自动作业或是被安装在防护网中被人引导作业的。协作机器人则不同,它和人类近距离接触,能够与人在同一工作环境中协同工作,在生产生活中充当不同的角色,如在办公室环境下它可以是和人类一起工作的自主机器人,在工厂中它可以充当没有防护罩的工业机器人。
因此协作机器人在设计之初就从安全性的角度为人机互动提供了安全保障,在构造和性能上兼具了人和机器各自的优点,尤其体现了人的灵活性和适应性。那小i机器人是否真的和人一样灵巧又心细如发呢?节目现场给出了两轮挑战。
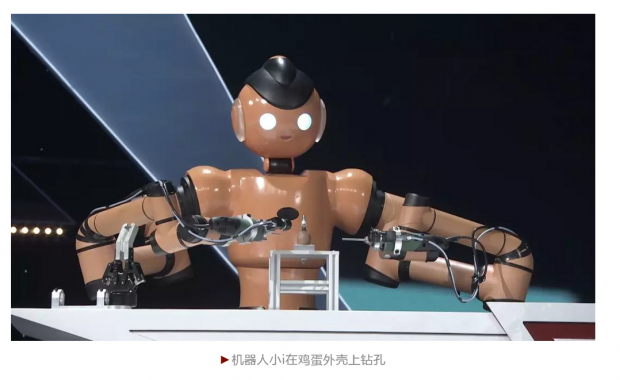
首先,小i需要在鸡蛋表面打五个孔,将蛋壳钻除,还要保证蛋膜完好无损。鸡蛋壳的厚度是0.3-0.4mm,蛋壳内部的蛋膜更薄。从技术层面分析,小i成功完成挑战依靠的是完整的自主规划能力和准确的力反馈控制。
小i利用每个机械臂腕部的摄像头对鸡蛋表面进行三维扫描,确定好正确的钻孔位置和钻孔方向(垂直于蛋壳曲面的方向)。实际钻孔过程中利用机械臂的力反馈传感器感受蛋壳钻透时刻的阻力变化,做出停机控制。最终结果是小i操作的效率和准确度远超人类选手。
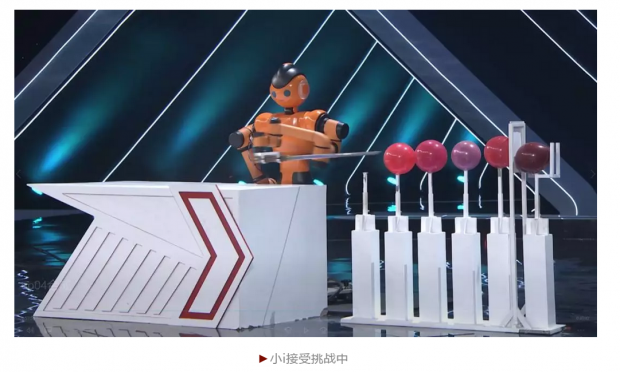
在另一个挑战中,小i需要利用一把唐刀迅速刺破紧贴在气球表面的A4纸,气球要完好无损。传感器在接触到纸的瞬间感受到阻力变化,同时要排除气球弹性对力感知的干扰,在电光火石之间做出停机指令,准确快速制动机械臂运动,这样的操作给力反馈控制提出了极高的要求。最终小i也成功完成了挑战。
90后机器人
在机器人领域中,协作机器人还很年轻。1996年,由美国西北大学的2位教授J.Edward Colgate和Michael Peshkin首次提出,并申请了专利。协作机器人概念的提出,来源于1995年通用汽车基金会(General Motor Foundation)的资助项目,该项目试图找到相关方法使机器人变得足够安全以便可以和工人协同工作。
2005年,专门研发协作机器人的Universal Robots公司在丹麦成立。公司创始人在丹麦大学的研究中意识到了中小企业对灵活制造的需求。到2009年,Universal Robots公司推出了一款机器人——UR5,全球首款协作机器人诞生。
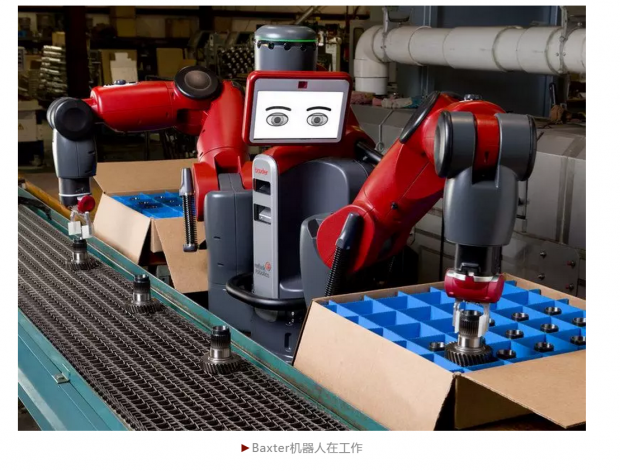
2012年,Rethink Robotics推出了双臂协作机器人Baxter。Baxter以用户友好著称,使用了拖动示教系统方便用户快速设定机器人动作,同时创新地研发了具有弹性的仿生机械臂关节,保证使用安全。
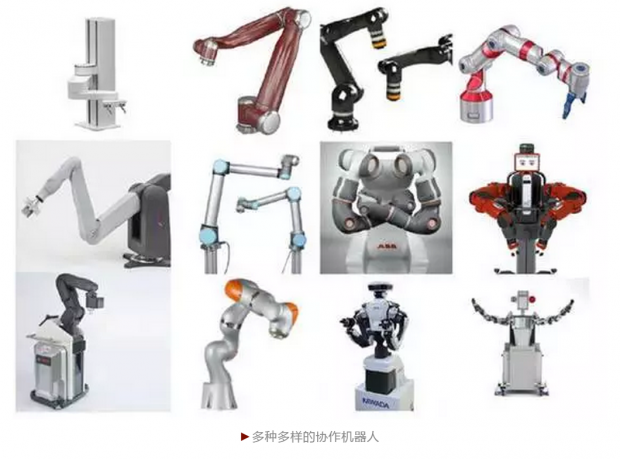
自此之后,协作机器人市场大门被打开,不仅传统四家工业机器人巨头纷纷进军这一新领域,KUKA的LBR iiwa(2013)、ABB的Yu Mi(2014)、FANUC的aR-35iA(2015)以及Yaskawa的MOTOMAN-HC10(2015)相继推出,同时市场上出现了越来越多的新创立的协作机器人公司。协作机器人的概念也被大家所认识和接受,并逐渐发展成为全球关注的焦点。轻型,灵活,安全成为协作机器人的标签。
工业机器人领域的新发展
工业机器人产业经历了几十年的发展,已经走向成熟。而我国起步较晚,核心部件(伺服电机、减速器、控制器等)的制造与世界先进水平还存在差距。例如,控制机械臂精确运动的核心零件减速器。机械臂的伺服电机在低频运转下容易发热和出现低频振动,不利于确保长时间和周期性工作的工业机器人精确、可靠地运行,而精密减速器能够使伺服电机在一个合适的速度下运转,并精确地将转速降到工业机器人需要的速度。国际上精密减速器的生产被少数几家日本公司垄断,其中Nabtesco由两家具有60年以上历史的日本工业企业帝人精机和纳博克合并而来,全球市场占有率达到60%,Harmonica占有率达15%。
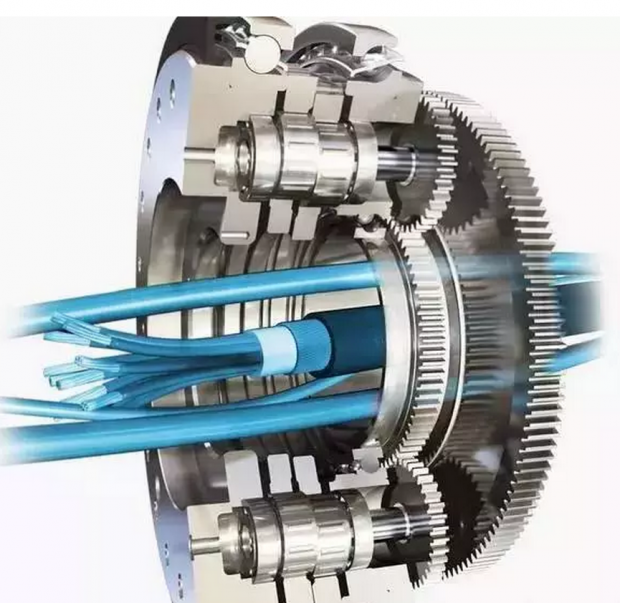
►减速器结构示意图
差距中蕴含着机遇,我国近年来出现了一批减速器研发生产企业,国产减速器的质量在逐步提升。一些相关的指标,如传动误差、回差与国际水平的差距已明显缩小。从小i机器人的精确控制中可以看到国产机器人核心部件的发展潜力。
另一方面,人工智能等新兴技术也在与工业机器人结合中。2015年,Google与来自加州大学伯克利分校的研究者Sergey Levine和Pieter Abbeel开发的深度学习系统使机器人可以自己完成挂衣服,开瓶盖等动作。2016年,Sergey Levine再次与Google合作,通过视觉识别使机械臂完成了抓取多种形状物体的自主学习,而不需要人为程序指定,这在工业生产线中具有潜在的应用价值。
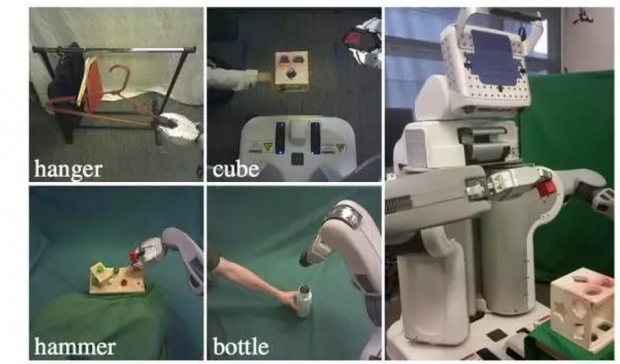
►深度学习方法控制机器人抓取各种物体
机器人产业是实现制造现代化的支柱之一,是衡量国家制造业水平和科技水平的标志。然而国内的相关技术研究起步较晚,与世界先进水平仍存在较大差距。正如清华大学鲁白教授在《机智过人》节目现场所指出的,“中国是全球最大的机器人市场,但是投入使用的很多工业机器人应用的都是国外的技术,期待看到更多这样优质的国产工业机器人投入到工业生产当中去”。

▼▼▼点击此处,直达知识分子书店。
话题:

0
推荐
财新博客版权声明:财新博客所发布文章及图片之版权属博主本人及/或相关权利人所有,未经博主及/或相关权利人单独授权,任何网站、平面媒体不得予以转载。财新网对相关媒体的网站信息内容转载授权并不包括财新博客的文章及图片。博客文章均为作者个人观点,不代表财新网的立场和观点。
 京公网安备 11010502034662号
京公网安备 11010502034662号 {kind=link}