细胞大小的机器人大军深入人体,在体内随意游走,这在几年前听起来像极了科幻电影。但如今,这一技术已成为现实,且最近又收获了新的突破。
微型机器人大军(版权:Criss Hohmann)
撰文|惠 鑫 责编|何义均 戴 威
一直以来,人们希望将电子器件微型化,生产出细胞大小的机器人,但缺乏符合需求的微米级致动器系统,限制了这一目标的实现。
微米级致动器系统需要满足两个基本要求:可与半导体处理无缝集成,并可响应标准电子控制信号。
8月26日,《自然》发表的一篇研究推进了微型机器人的发展。康奈尔大学纳米科学 Kavli 研究所的 Marc Z.Miskin 及其合作者研究了一类新型电化学致动器(SEA),它们与现有硅电子器件兼容,电压可控,能够唤醒机器人,使得它们移动 [1]。
微型或纳米机器人的研究已有一段历史。
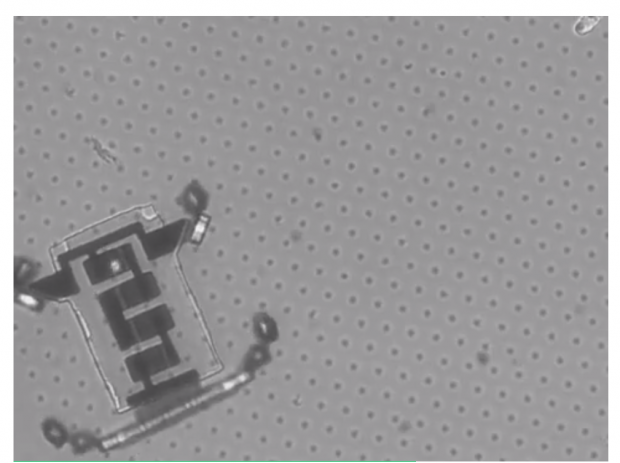
2018年,美国麻省理工学院(MIT)开发出细胞大小、并且能够感知外部环境、储存数据并执行计算任务的微型机器人,之后又在二维石墨烯材料和电路材料上进行 “全自动射孔”,也就是在材料上打出细小的点(如下图所示),开发出了一种大规模制造细胞大小机器人的方法 [2]。这种被称为 “syncells”(合成细胞)的微观设备,有望用于工业或生物医学监测。
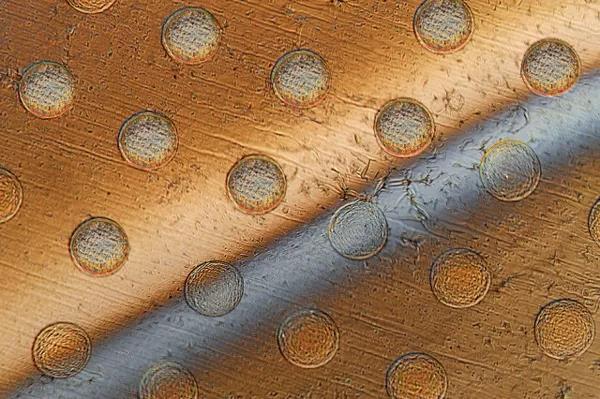
石墨烯片上的“全自动射孔”。图源[2]
致动器(actuator)又称为驱动器,是机器人行走的关键。传统的压电致动器虽然非常适合毫米级的机器人,但当曲线弯曲变化程度达到微米级时,其缩放比例无法运行 [3-5],另外散热效率低下,且由于热量的快速扩散而难以在小尺寸情况下进行单一处理。导电聚合物微致动器,受到用于微细加工的化学品(溶剂,显影剂和蚀刻剂)的破坏,很难集成到硅加工环境中。而基于光学、声学、磁学、热学或化学的致动器无法响应标准电子控制信号 [1]。
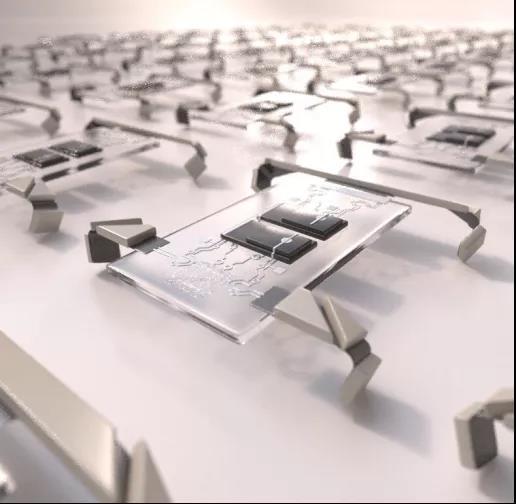
释放前的微型机器人(Marc Z.Miskin)
相比较而言,这个新开发的机器人尺寸小于0.1毫米,微型机器人最大厚度为5微米,宽度和长度尺寸分别为40微米*40微米或40微米*70微米。
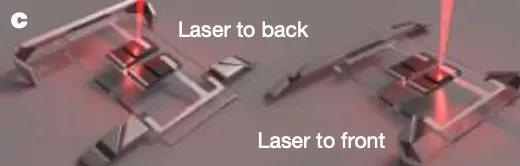
激光脉冲刺激,图源[1]
这项研究的关键创新在于新型电化学致动器(SEA)。它构成了机器人的腿,由纳米级的铂制成,并由标准光刻工艺制造。SEA受到激光脉冲刺激时,就会弯曲,驱动机器人行走。
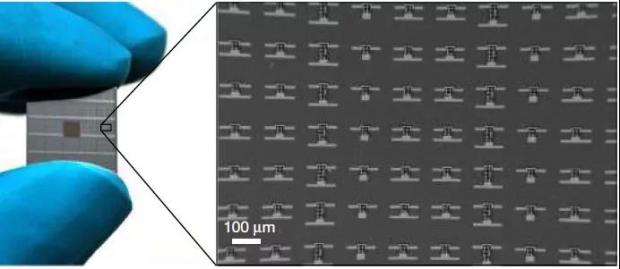
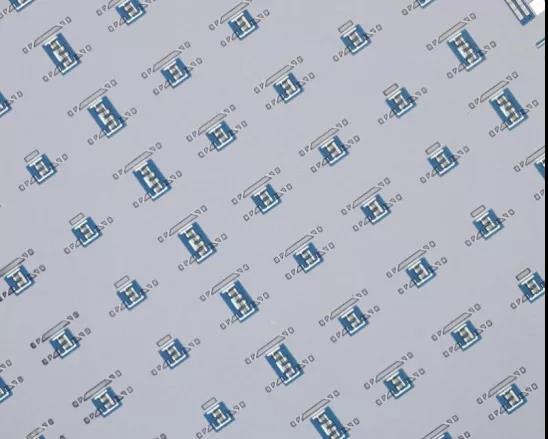
分布有机器人的芯片光学图像。 芯片是从一个四英寸的晶片上切下来的,表面上有大约一百万个微型机器人。图源[1]
新型致动器可在低电压(200毫伏)下从平面弯曲成曲面,而且这一过程可逆,消耗的能量才不到10纳瓦,并且与硅加工完全兼容,实现了与半导体工艺无缝集成,使其更容易将电子器件微型化,以生产细胞大小的机器人。
为展示新型电化学致动器的潜力,研究者在4英寸晶圆上创造了一个行走的超百万数量的微型四脚机器人大军,意味着可规模化生产的、与硅电子器件兼容的功能性机器人迈出了重要一步。
研究者分析认为,SEA满足了电控微型机器人致动器的所有要求:曲率半径小、低压致动、低功率、持续的力输出和稳定性 [1]。SEA可用于需要微米级致动器的任何应用中,且任何能够提供200毫伏电压和约10纳瓦功率的电源都可以充当控制器。就目前而言,这是世界上唯一满足这些优势的致动器。
在转圈的微型机器人。通过改变刚性面板的样式可以改变机器人的运动。这里后腿相对机器人身体略微旋转,另机器人绕圈行走。视频为8倍速。版权:Marc Miskin
作为已知的第一个尺寸小于0.1毫米的机器人,它们由高度稳定的材料制成,能在高酸性环境和超过-73.15摄氏度的温度变化中生存下来。这样的机器人足够小,可以通过皮下针头注射到生物体内并保持机械性能,可以自主地探索微环境,还能使用局部的感觉输入和反馈直接与生物系统进行交互,为探索生物环境内的应用带来了可能。
这些机器人目前功能有限,比如它们比其他游泳机器人慢,不能感知环境,而且缺乏综合控制。不过,它们与现有硅技术(CMOS:一种制造大规模集成电路芯片用的技术)的兼容性,使其能够快速发展更多的功能。此外,研究者估计 [1],每个微型机器人的制造成本远低于一美分,为规模化应用降低了成本。
1959年,诺贝尔物理学奖获得者费曼(Richard Feynman)曾设想,未来的某一天,人类手术将由可以自行在体内进行手术和药物释放的微型机器人在人体内来完成。新型电化学致动器技术的突破,或将帮助重新唤醒这一 “曾经的科幻”。
参考链接
[1] Miskin, M.Z., Cortese, A.J., Dorsey, K. et al.2020.Electronically integrated, mass-manufactured, microscopic robots. Nature. 584:557–561.
[2]
[3] Piazza, G.,Felmetsger,V.,Muralt,P.,Olsson,R.H.III&Ruby,R. 2012.Piezoelectric aluminum nitride thin films for microelectromechanical systems.MRS Bull.37,no.3: 1051–1061.
[4] Sinha,N.etal.2009.Piezoelectric aluminum nitride nano electro mechanical actuators. Appl.Phys. Lett. 95, 053106.
[5] Zaghloul, U. & Piazza, G. 2013.10–25 nm piezoelectric nano-actuators and NEMS switches for millivolt computational logic. In 2013 IEEE 26th Intl Conf. Micro Electro Mechanical Systems (MEMS), 233–236.

0
推荐
 京公网安备 11010502034662号
京公网安备 11010502034662号 {kind=link}