阅读:0
听报道

天问一号着陆器降落火星(艺术图)
撰文 | haibaraemily
责编 | Steed
今天清晨,经过惊心动魄的九分钟,中国首个火星车祝融号成功穿越火星大气层,着陆于火星北半球的乌托邦平原南端。
自此,继苏联和美国之后,中国成为了第三个成功着陆火星的国家。
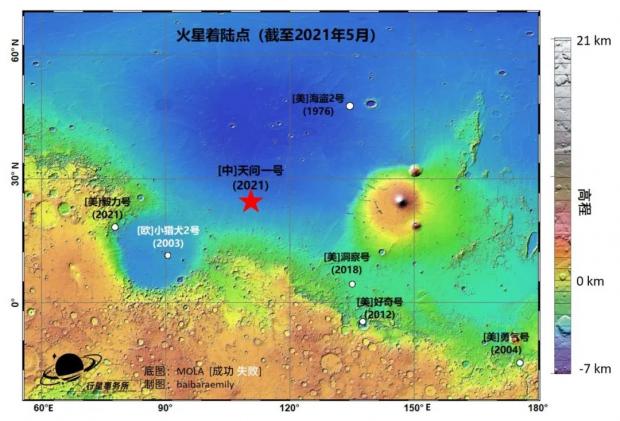
祝融号着陆点 | haibaraemily
为了这一天,这辆以中国神话传说中火神命名的小车,从地球出发跋涉数亿公里而来,绕着火星等待了足足三个多月。
图 | 新华社
火箭专家和宇航先驱齐奥尔科夫斯基说过:“地球是人类的摇篮,但人类不可能永远生活在摇篮中。” 火星是我们探索宇宙重要的一步,或许有生之年人类登上火星,不是那么遥远的梦想。科学家根据现有知识,已经能对火星生活给出大概的猜测。
测地观天,摩拳擦掌
2021年2月10日,经过6个半月奔火飞行的天问一号 “刹车” 减速(近火制动),顺利进入环火星轨道,成为中国首颗到访火星的探测器。但天问一号并没有急着让祝融号立刻着陆,而是沉着耐心地准备了三个多月。
除了调整轨道、测试仪器之外,天问一号还要完成这些准备工作:
一是 “测地”,用自带的相机等仪器获取备选着陆区的高清地形和地质数据,为祝融号认真考察着陆区。

天问一号“扫描”火星表面示意图 | 航天科技集团
为什么明明已经有那么多探测器给火星拍过照了,天问一号还要花时间自己拍照确认着陆区呢?因为虽然中分辨率影像几乎覆盖火星全球,但现有的米级-亚米级高分辨率影像覆盖率还是太低了。
在拍摄距离相同的情况下,探测器视场角大的相机拍出的照片图幅更大,很容易覆盖全球,但分辨率较低,而分辨率较高的相机往往视场角小,即使是长年不懈地拍摄,一小张一小张拼起来也需要许多许多年才能覆盖全球。
这是乌托邦平原一带现有米级-亚米级分辨率影像的覆盖状况,红色是火星勘测轨道器(MRO)搭载的高分辨率成像科学实验(HiRISE)拍摄影像(~0.5米/像素,轨道高度在300公里左右)覆盖区域,绿色是火星全球勘测者(MGS)搭载的MOC拍摄影像(~1.4米/像素,轨道高度在378公里)覆盖区域。
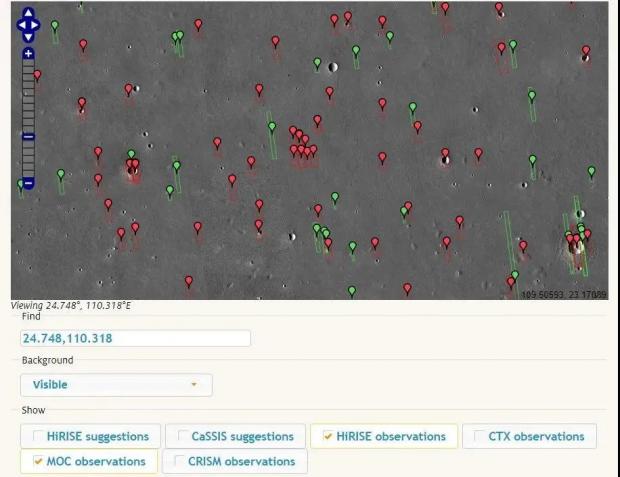
每张HiRISE影像覆盖火星表面6公里宽的区域 | UArizona/LPL [1]
显然,我们要是想去现有的火星高分辨率影像数据库没覆盖到的地方,或者虽然已经有影像覆盖,但影像质量不够高的地方,还是靠自己去拍最靠谱。
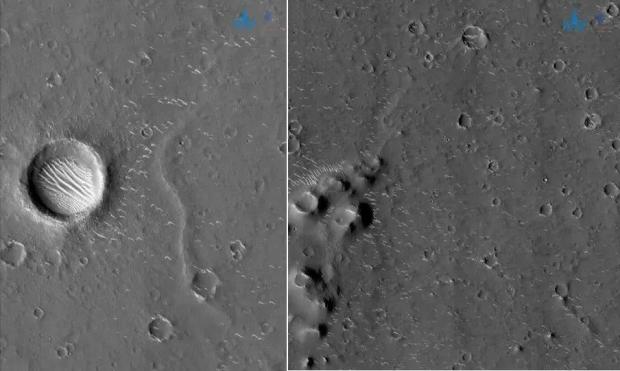
天问一号今年3月传回的两张高分辨率相机影像,分辨率0.7米/像素(@ 330-350公里高度),可以看出大量地形地貌细节,能够满足为火星车考察着陆区的需要 | CNSA
二是 “观天”,为祝融号做气象预报,挑选合适的着陆时机。
着陆不仅要挑尽量平坦的地方,还要挑尽可能天朗气清,日丽风和,没有沙尘暴捣乱的时候,这对使用太阳能板供电的祝融号来说尤为重要。

2018年6月,好奇号拍摄的火星全球性大沙尘暴的景象 | NASA
历史数据显示,祝融号计划着陆的北半球,在火星春夏期间沙尘暴最为低发。特别是从春分到夏至中间开始的几个月里,有观测记录以来从未发生过沙尘暴。
今年这个火星年,北半球的春分发生在2021年2月7日,夏至发生在2021年8月25日。春分到夏至的正中间,刚好是5月中下旬,接下来的6个月里,着陆地点大概率是晴空万里、阳光普照。
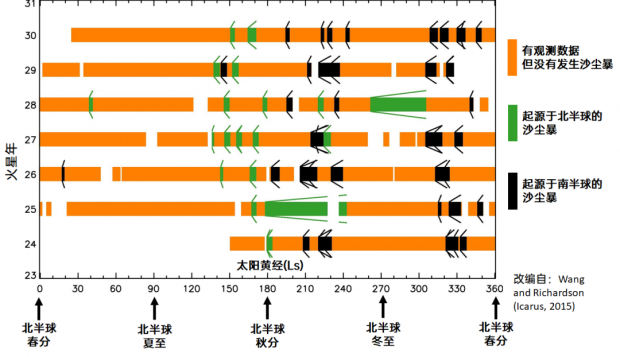
1996年到2013年(即火星年23-31)间,火星环绕器观测记录的沙尘暴。注意,起源于北半球的沙尘暴也可能发展到南半球范围,反之亦然 | 改编自:参考文献 [2]
在此基础上,行星科学家还利用现有的火星探测器遥感数据(主要是亮温和阳光透射率数据)和着陆区的实际位置、地形情况,对计划着陆区做气象预报。综合判断,祝融号在五月中旬之后着陆最为稳妥。
经过这些准备工作,祝融号终于在今天迎来了着陆。
“探测器坟场”
火星虽然只有稀薄的大气层,但已经足以烧坏高速进入的探测器。因此想要着陆火星的探测器都必须“铠甲”护身,被打包塞进隔热的保护罩里,这个罩子叫 “气动外罩”。
天问一号的着陆平台和祝融号火星车,一路上都被塞在这个罩子里,直到快要落地才会 “破罩而出”。
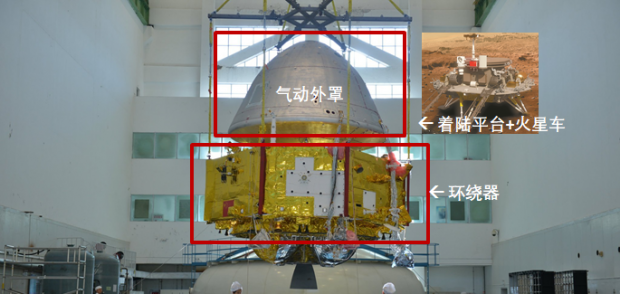
天问一号组成结构 | 素材来源:航天科技集团
但仅仅加个保护罩还远远不够。从进入火星大气层,到着陆火星表面,探测器需要从初速度数公里/秒逐步减速到0,然后稳稳当当地落地。由于信号延迟和屏蔽,着陆过程中的所有步骤都需要探测器自主完成,得不到来自地球的任何帮助,稍有差池,就可能殒命火星。
从1960年人类第一次尝试发射火星探测器到祝融号之前,一共有16次火星着陆任务成功进入了火星大气层,但只有9次任务成功着陆并顺利开展探测工作——近一半的失败率让这颗红色星球至今还保有“探测器坟场”的称号。
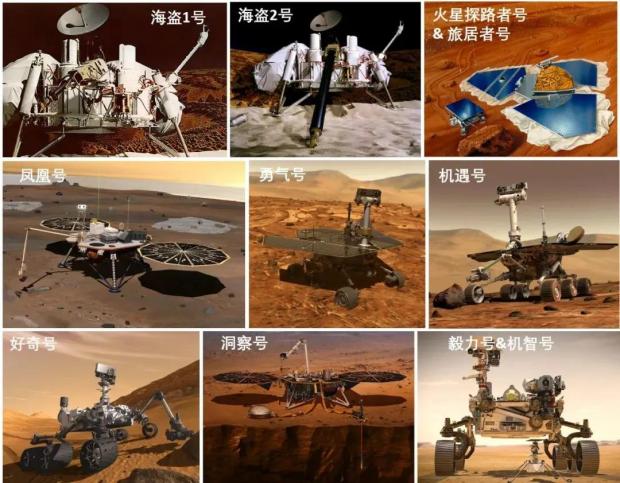
祝融号之前所有着陆火星并成功开展工作的探测器 | NASA
值得一提的是,这9次任务全部都是NASA的,而其他国家最接近成功的一次,是苏联的火星3号。
1971年,NASA的水手9号,苏联的火星2号、3号相继抵达火星。水手9号只有环绕器没有着陆计划,火星2号和3号都携带了着陆器和火星车。那一年,苏联距离首次完成 “绕、着、巡” 三大任务只有一步之遥。
然而,好巧不巧,它们碰上了火星全球性的沙尘暴,整个火星表面一片模糊。
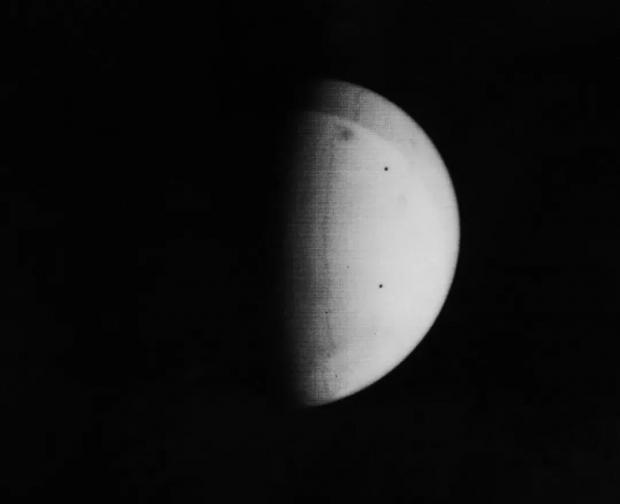
1971年11月11日,水手9号拍摄的火星。上方的黑斑是火星最高峰奥林帕斯火山 | NASA/JPL
两眼一抹黑被草草扔下的火星2号着陆器直接着陆失败,火星3号着陆器虽然成功着陆,但仅20秒后就迅速失联,连拍摄的第一张照片都没能传全乎 [3],火星3号着陆器的火星车是否成功释放,自然也就无从知道了。
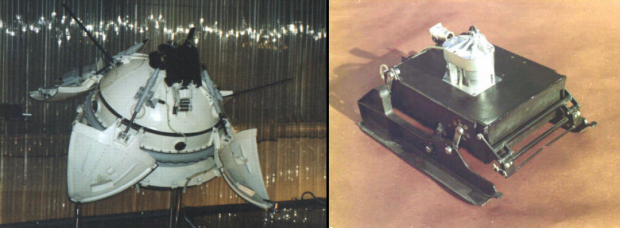
火星2号/3号的着陆器(左)和火星车(右) | 维基
严格来说,苏联的火星3号勉强算是第一个成功软着陆火星表面的探测器,只是没能顺利开展探测工作。给它算0.5次,还算合理吧。
火星3号着陆器传回的唯一一张“照片” | 苏联 [3]
欧空局也在21世纪里挑战了两次火星着陆,但均告失败。
一次是2003年的火星快车号环绕器携带的着陆器小猎犬2号,着陆时失联;另一次是2016年的痕量气体轨道器(TGO)携带的斯基亚帕雷利号着陆器,因为打开降落伞后软件故障而着陆失败。
不过,幸运的是,两艘环绕器都非常健康,一直工作至今,获取了许多珍贵的火星探测数据。

欧空局的小猎犬2号和斯基亚帕雷利号 | ESA
很难说这两次着陆失败完全是运气不好,因为欧空局的下一个火星着陆任务 ExoMars 2022(与俄宇航合作)也因为降落伞测试失败,错过了2020发射窗口。至少从目前看来,欧空局和俄宇航对着陆火星依然有关键技术需要攻关。
挑战 “恐怖八分钟”
着陆火星这短短的几分钟,也常常被称为 “恐怖七分钟” 甚至 “死亡七分钟”。
不过,这个 “七分钟” 其实是那些抵达火星后直接着陆的探测器所需的时间,因为这些探测器在进入火星大气层时初速度更大,着陆过程所需的时间自然会短一些。
例如洞察号着陆器,进入火星大气层时速度约为5.5 公里/秒,整个着陆过程花了6分45秒。
而天问一号这样先刹车入轨再择机分离着陆的探测器,着陆时间会比7分钟更长。因为这些探测器在入轨的时候已经减过速,所以进入大气层时的初速度会低不少。
典型的例子是NASA的海盗号任务,也是先进入环火星轨道,对着陆区进行了一个多月的考察之后,才择机释放的着陆器。在这种情况下,海盗号着陆器进入火星大气层的速度是4.6 公里/秒,比洞察号低了16%。这段着陆过程花了大约10分钟 [4]。
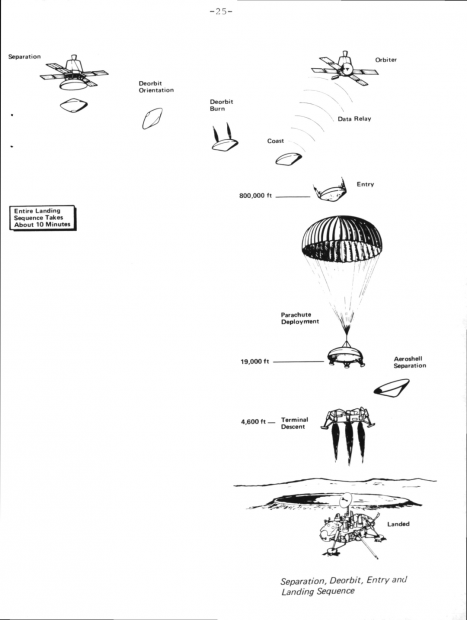
海盗号着陆过程 | NASA《海盗号任务手册》[4]
按目前公布的时序来看,天问一号整个着陆过程经历六个阶段,从第二阶段直至着陆大约需要8-9分钟:
1)着陆准备段:环绕器调整姿态和轨道,与装着着陆巡视组合体的气动外罩分离;
图源:科普中国/Kerwis团队
2)气动减速段:气动外罩以4.8公里/秒的速度和合适的角度进入大气层,利用大气摩擦减速到460米/秒;
图源:科普中国/Kerwis团队
3)伞系减速段:在约11公里高度处打开降落伞,利用降落伞进一步减速到约95米/秒。这一阶段内还会完成一系列操作,包括抛掉底部隔热盾,打开着陆平台的着陆腿,抛掉背罩和降落伞等;
图源:科普中国/Kerwis团队
4)动力减速段:利用着陆平台底部的7500N发动机点火产生的反冲力,将速度进一步降到约1.5米/秒;

图源:CNSA
5)悬停避障段:在距离火星表面100米高度处将速度减到0,达到相对于表面静止的悬停状态,在这个状态下调整水平位置,避开脚下的障碍物;
6)缓冲着陆段:依靠着陆腿缓冲,着陆平台稳稳地落在火星表面。
后三个阶段和嫦娥三号、四号着陆过程是相似的。
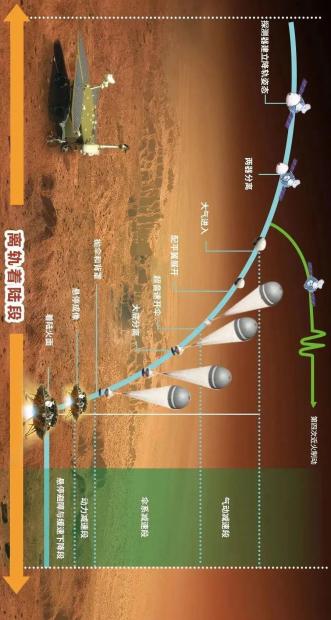
天问一号的“恐怖八分钟” | 航天科技集团
天问一号的成功着陆,是中国航天史上新的里程碑,标志着中国已经掌握了安全着陆火星的一系列复杂技术,也意味着中国 “后发先至”,在两度挑战火星着陆失败的欧空局之前完成了火星着陆,成为继苏美之后第三个成功着陆火星的国家/组织。
不过别着急,现在还只是天问一号的着陆平台踏上了火星。等再过几天,祝融号从着陆平台上驶下,用自己的车轮触碰火星表面,开展巡视工作之后,这个纪录还能再次刷新:中国将有望超越苏联,成为继美国之后世界第二个成功着陆火星并顺利开展探测工作的国家/组织。
祝融号带了啥好东西?
火星车共携带了六种科学仪器:导航与地形相机(NaTeCam)、多光谱相机(MSCam)、火星表面成分探测仪(MarSCoDe)、火星车磁强计(RoMAG)、次表层雷达(RoPeR)和火星气象站(MCS)。
注意,这里说的都是 “科学” 仪器,事实上探测器还会携带诸多工程仪器,例如避障相机、监视相机、惯导装置等等。

祝融号火星车科学仪器大致位置。火星车高约1.85米,重240公斤。图中火星车外形与实物有一定差异 | 参考资料 [5-7]
其中,一对导航与地形相机位于火星车桅杆顶端,是火星车的 “双眼”,可以拍摄立体影像,负责帮助火星车导航和探测火星车沿途的地形地貌。

来源:参考资料 [8]
多光谱相机和表面成分探测仪负责探测和分析火星表面的岩石类型、矿物成分。
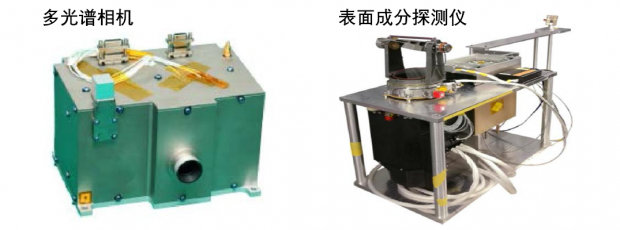
来源:参考资料 [7]
好奇号和毅力号火星车各有一个炫酷的 “激光炮”——它们的化学相机(ChemCam)和超级相机(SuperCam)使用了一种叫做激光诱导击穿光谱(LIBS)的技术。
祝融号的表面成分探测仪也用了这项技术:通过向目标物发射高能激光脉冲,探测烧蚀激发出的等离子体冷却过程中的特征光谱,进而远程探测出目标物的化学成分。
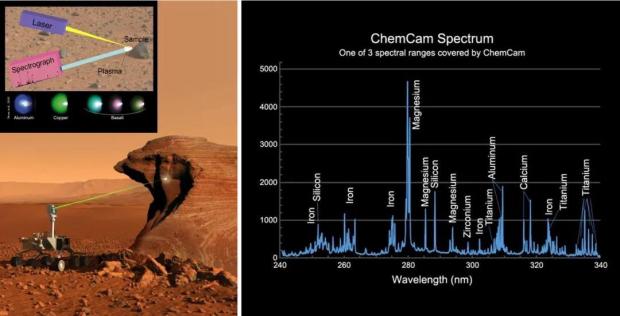
(左)好奇号化学相机(ChemCam)的工作原理示意图;(右)好奇号化学相机探测目标物中含有的化学成分示例 | NASA
祝融号火星车携带了2个磁强计,分别位于桅杆的顶端和底端,负责探测火星表面的磁场强度。
火星没有地球、水星那样内部自发的偶极磁场,但火星的壳层还有一些剩磁。
祝融号的探测结果既能帮助我们了解火星壳层剩磁的信息,也能与天问一号环绕器携带的磁强计探测结果相结合,帮助我们了解太阳风与火星高层大气/电离层的相互作用。
这也将是首个火星表面可移动的磁场探测仪器。
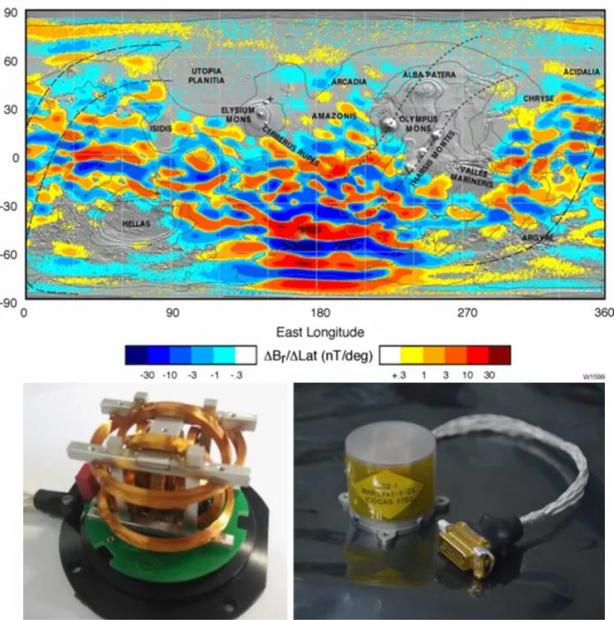
(上)火星全球探勘者号(MGS)在400公里高处获取的火星壳层磁场分布,火星剩磁有着明显的南北不对称性,主要分布在南半球 | 参考文献 [9];
(下)祝融号火星磁强计传感器的结构和封装后的外观 | 参考文献 [10]
次表层雷达通过主动发射和接收电磁波信号来探测火星车沿途地下的浅表层结构,例如风化层厚度、地下浅层结构、水冰分布等。
次表层雷达主要原理是:不同物质的介电常数(可以简单理解为让电磁波衰减的能力)不同,因此探测器收到的从不同物质分界面反射回来的电磁波的时间和强度就会不同;反过来,通过测量到的雷达接收时间和反射强度,就可以反推这些雷达信号穿过了哪些不同的物质,每层物质有多厚。
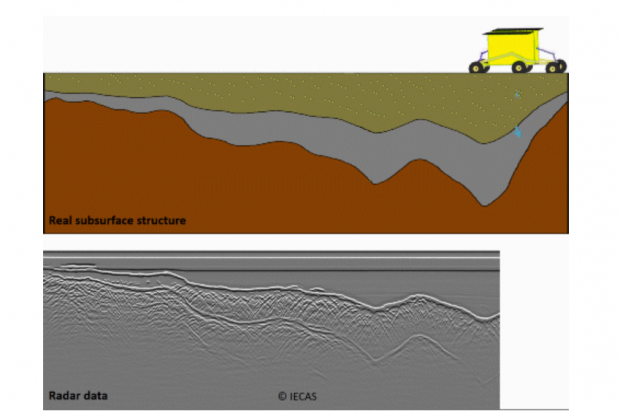
次表层雷达的工作原理 | 中科院电子所
与嫦娥三号、四号的测月雷达相似,祝融号也搭载了2个不同频率的次表层雷达,高频雷达探测浅部,低频雷达探测深部,这样可以兼顾探测深度和探测分辨率。

祝融号的低频和高频雷达天线 | 参考文献 [7]
除了祝融号火星车,天问一号环绕器和NASA毅力号火星车也携带了次表层雷达。综合分析多个雷达的探测数据,可以帮助我们了解火星上不同区域、不同深度的次表层结构。
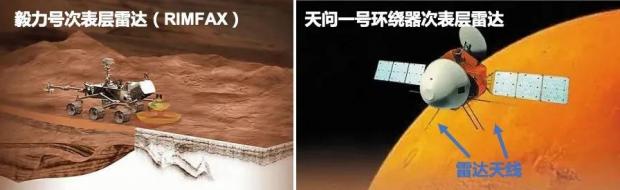
毅力号和天问一号环绕器的次表层雷达 | NASA、CNSA
火星气象站可以通过长期观测火星车附近的气温、气压、风速、风向等气象参数,为我们了解火星的气象状况,追溯火星的气候变化历史积累数据。

祝融号的火星气象传感器 | 参考文献 [7]
火星气象站是火星着陆任务的常备组件,如今正在火星表面工作的好奇号火星车、洞察号着陆器、毅力号火星车,都在长期记录和播报所在地的气象数据。接下来祝融号的加入,会让火星气象网新增一个移动站点(说不定就叫 “祝融站” 呢~)
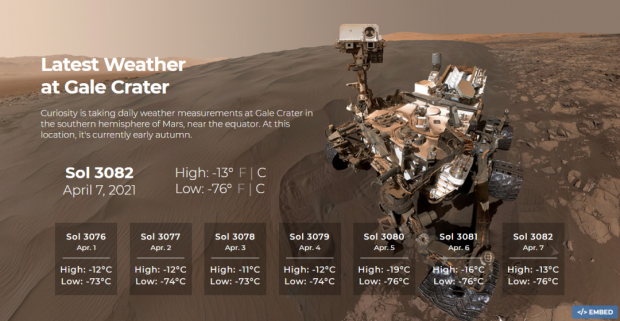
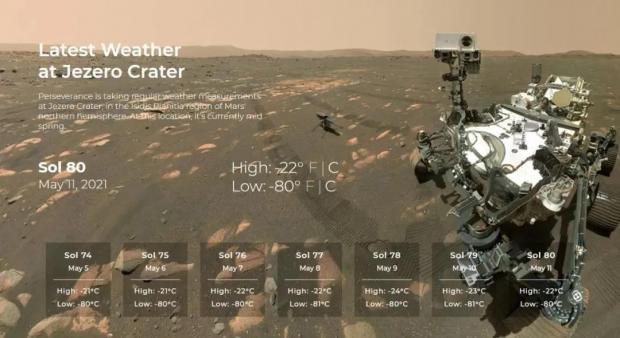
目前正在工作中的三个火星移动/固定气象站 | NASA [11]
火星车计划开展约90个火星日的巡视探测,在此期间,环绕器会停留在通讯中继轨道(近火点265公里、远火点12500公里,周期约8个小时)[7],为火星车和地球传递信息和数据。
之后,环绕器会降轨至科学探测轨道(近火点265公里、远火点12000公里),计划在这个轨道上对火星全球展开1个火星年(约2个地球年)的近距离遥感探测 [7],同时可以兼顾火星车的数据通讯。
不过,眼下我们将迎来的下一个激动时刻,是火星车从着陆平台上缓缓滑下,用自己的车轮真正踏上火星的红色土地。
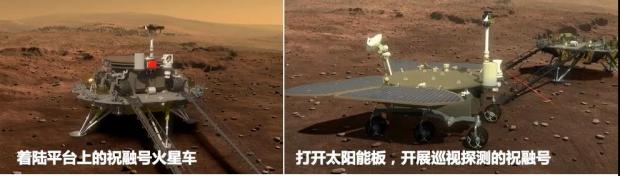
祝融号的下一步行动 | CNSA
让我们再耐心等待几天吧~~
本文首发于《果壳》,《知识分子》获授权转载。
参考资料:
[1]
[2] Wang, H., & Richardson, M. I. (2015). The origin, evolution, and trajectory of large dust storms on Mars during Mars years 24–30 (1999–2011). Icarus, 251, 112-127.
[3] Soviet Mars Images
[4] NASA |Viking Press Handbook
[5] Wan, W. X., Wang, C., Li, C. L., & Wei, Y. (2020). China’s first mission to Mars. Nature Astronomy, 4(7), 721-721.
[6] 李春来,刘建军,耿言,等. 中国首次火星探测任务科学目标与有效载荷配置[J]. 深空探测学报,2018,5(5):406-413.
[7] Zou, Y., Zhu, Y., Bai, Y., Wang, L., Jia, Y., Shen, W., ... & Peng, Y. (2021). Scientific objectives and payloads of Tianwen-1, China’s first Mars exploration mission. Advances in Space Research, 67(2), 812-823.
[8] Liang, X., Chen, W., Cao, Z., Wu, F., Lyu, W., Song, Y., ... & Wang, L. (2021). The Navigation and Terrain Cameras on the Tianwen-1 Mars Rover. Space Science Reviews, 217(3), 1-20.
[9] Connerney, J. E. P., Espley, J., Lawton, P., Murphy, S., Odom, J., Oliversen, R., & Sheppard, D. (2015). The MAVEN magnetic field investigation. Space Science Reviews, 195(1), 257-291.
[10] Du, A. M., Zhang, Y., Li, H. Y., Qiao, D. H., Yi, Z., Zhang, T. L., ... & Dai, J. L. (2020). The Chinese Mars ROVER Fluxgate Magnetometers. Space Science Reviews, 216(8), 1-15.
[11]
话题:

0
推荐
财新博客版权声明:财新博客所发布文章及图片之版权属博主本人及/或相关权利人所有,未经博主及/或相关权利人单独授权,任何网站、平面媒体不得予以转载。财新网对相关媒体的网站信息内容转载授权并不包括财新博客的文章及图片。博客文章均为作者个人观点,不代表财新网的立场和观点。
 京公网安备 11010502034662号
京公网安备 11010502034662号 {kind=link}