阅读:0
听报道
导 读
原产于北美东南部氤氲湿地中的捕蝇草,可能是世界上最著名的拥有快速运动能力的植物,自然选择学说的提出者查尔斯·达尔文也曾研究过它。
如今,科学家们仍然在探索植物运动机制,也许有朝一日,这些新发现会给未来的机器人设计带来独特的生物灵感。
撰文|Daniel Rayneau-Kirkhope
翻译|Browneyedsilvia
校译|于茗骞
责编 | 冯灏
据说,艾萨克·牛顿曾宣称,“单单是人类大拇指的精巧构造,已足以令我坚信造物主的存在。” 由29块骨头、123处韧带和34条肌肉有序联结组成的人手,的确可被称为是自然的杰作。能够书写、触摸、抓握、感受,双手让我们以相当极致的精度与周遭环境互动。
为了复制人手的精妙构造,“软机器人”(soft robotics)领域的研究者们试图在设计中使用柔软服帖而又具有弹性的材料,制作出能够用计算机来操纵控制的结构。然而,问题是,手的构造实在太复杂,需要极高的运算能力才能让机械手像真正的手一样灵活自如。如果想要给在事故或手术中失去手臂的人们开发机械义肢,这就是一个亟待克服的困难。
近来,设计者们从一个不寻常的方向找到了灵感——他们把视线移向了植物的运动。说到运动,人们首先想到的往往不会是植物。在我们能够观察到的尺度上,植物的运动大多十分缓慢,比如叶子对准阳光的方向调整角度的速度,往往缓慢到每秒钟只有几微米。不过,植物其实也拥有快速运动的能力,有些甚至快得惊人。举个例子,有的植物可以每秒几十米的速度散播种子,比叶子转向太阳的速度快了七个数量级,可以说是天差地别。
植物运动速度快慢的跨度之大,长久以来都吸引着科学家们的注意力。特别是与动物不同,植物没有肌肉或关节,只能通过其他巧妙的方式来实现可控而可靠的运动。没有大脑的中枢控制,这些运动往往是出于重力、光线、甚至触碰等外界刺激的结果。
为了理解植物的运动,生物学家们自然而然地把注意力放在触发动作的生化信号传导途径上。但是,这些动作本身的力学基础又是什么呢?换句话说,植物是怎样以如此精确有度、迅疾快速的方式运动的呢?对于这个问题,研究者们直到最近才开始从物理学的角度思考。实际上,植物的运动方式常常是由它们本身的结构所决定。
成功之种
让我们设想一下,植物如何传播它的种子。它需要把自己的种子散播得既远又广,才能够将后代在适宜环境中生根立足的机会最大化。与此同时,这样也能增强物种对于病害和天敌的抵抗性。一些植物,如蒲公英,通过可随风飘散的轻盈种子来达到这一点;另一些植物,如牛蒡,则为种子加上倒钩,让后代搭上动物和人类的顺风车,抵达新的环境。更有甚者,如蕨类植物,把它们的 “种子”,也就是孢子(spores),用如同中世纪投石机一样的方式发射出去。
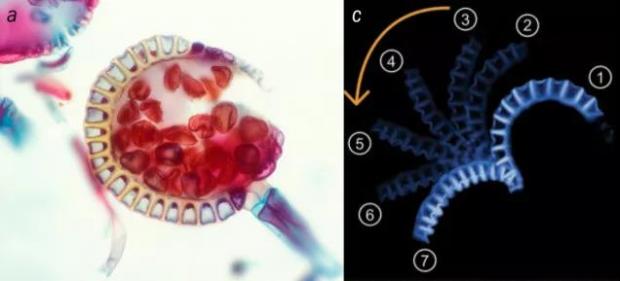
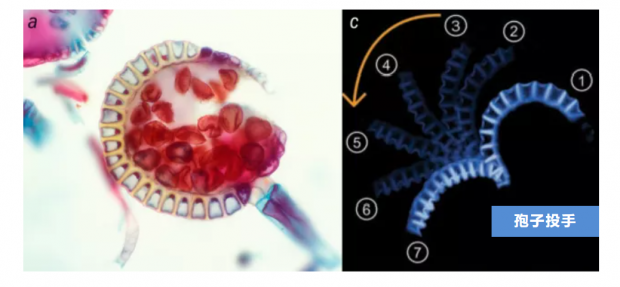
图1 孢子投手 (图源:左:Her ve Conge, ISM/Science Photo Library;右:图源:Science/AAAS)
a 真蕨亚纲的植物用一种精巧的机制散播它们储存在球形的孢子囊中的孢子(图中的红色颗粒)。孢子囊的一侧有一列沿经线方向排列的细胞,它们形成的半圆形结构叫做环带。环带细胞的细胞壁厚度不一,与孢子囊接触的基底面和环带细胞彼此之间的相邻面细胞壁最厚,从侧面看如同一个个U型(图中的淡黄色结构)。
b 当环带细胞失水皱缩,环带从位置①的半圆形逐渐打开,伸直到位置④,并继续往反向弯曲至位置⑦。随后,绷紧的环带突然回直(图中未演示),将顶端“上膛”的孢子像投石机一样发射出去。
最为优秀的蕨类 “投石机” 还属真蕨亚纲(译注:在分类学上与合囊蕨亚纲、瓶尔小草亚纲和木贼亚纲一起组成真蕨纲,即常说的 “蕨”)的成员。这些蕨类植物把孢子藏在叶背面的微小球形结构里,这些直径仅有0.2毫米的小球学名叫做孢子囊(sporangium),每一个球形的孢子囊一侧,有由一列细胞沿经线方向整齐排成的一个半圆,叫做环带(annulus)。(译注:这一列细胞的细胞壁在各面上厚薄不同:每个细胞的基底面(即与球形的孢子囊接触的一面;内侧轴向面)和与其它环带细胞的相邻面(即径向面),这三面细胞壁较厚,而其余的地方细胞壁很薄。细胞壁的薄厚则直接决定了在这一方向上可发生形变程度的大小,即细胞壁厚则形变程度小,细胞壁薄则形变程度大。)
随着环境温度升高而湿度降低,环带细胞内的水开始蒸发,就把环带由一个半圆逐渐拉直。在环带的拉扯下,球形的孢子囊沿赤道方向裂开一道裂口(stomium),将内含的孢子暴露出来。随着环带细胞失水皱缩的程度加剧,环带甚至被反向弯曲(图1),此时的环带蓄满了势能,如同一个拉紧的投石臂,随时准备着最后的发射。
当环带细胞继续失水,皱缩细胞内的水压进一步降低,直到低于水自身的蒸气压,细胞液中便开始出现看似如同气泡的空洞,而这些空洞内部其实接近于真空——这种液体在压力降低时内部自发形成空洞的现象被称作空穴现象(cavitation)。这些 “气泡” 在形成后便破裂,瞬间触发紧绷的环带,将孢子迅速发射出去 [1]。来自法国尼斯大学的 Xavier Noblin 团队2012年的这项研究发现,蕨类植物的孢子囊通过如此迅疾的能量释放,把孢子从静止瞬间加速到每秒10米的速度,相当于对孢子施加高达十万倍的重力加速度 [2]。
开荤的植物
植物不仅要确保后代的生存,自身也需要获取维持生命所需的养分。大部分的植物从土壤、空气和水中汲取营养、从阳光中收集能量,以此满足生存之需。然而,少数植物——约占所有被子植物物种的0.2%——拥有一个额外的营养来源:它们所捕食的动物。最广为人知的 “肉食” 植物便是捕蝇草(Dionaea muscipula),原生于美国东部的亚热带湿地环境中。
这种美丽植物的每一片叶子末端都有一对叶瓣,中间像扇贝的双壳一样铰合。当苍蝇或其它昆虫被叶瓣吸引,来到上面一探究竟,叶瓣上细小的毛受到刺激便触发叶瓣的闭合,将猎物捕获并囚禁在两片叶瓣合拢形成的狭窄空间中。叶片的密室接着分泌出含有酶的液体,把动物的软组织消化溶解成可以被吸收的流质。等植物将所需的营养摄取殆尽,叶瓣重新打开。随着昆虫的残骸被风带走,捕蝇的陷阱已经准备好迎接下一只猎物的到来。
捕蝇草若想吃饱,就不能在速度上输给自己的猎物,何况苍蝇可以很快(在400毫秒内)做出反应。实际上,捕蝇草闭合叶瓣只需要苍蝇反应时间的大约四分之一,在猎物回过神来之前就能早早完成动作。
那么问题就来了,植物如何能够反应得这么快呢?对于许多可以运动的植物来说,高速的秘密在于液压传动(hydraulics)。通过改变叶片不同区域细胞中的离子浓度,植物能调节体内的水分的分布。水少的细胞会缩小,而水多的细胞则会膨大,这使得植物能够自主地改变形状,例如使同一片叶子的一面伸长、另一面缩短。叶片因此能够完成特定的动作,就像人收缩上臂的肱二头肌便可以抬起手臂。
随着植株大小的增长,运动所需调节的水量也增加。不过,液体流动的速度有限,所以一株既定尺寸的植物会有它的运动速度上限,除非它有自己的独门妙技。这就意味着对于捕蝇草来说,如果它只能利用液压实现运动,当叶瓣终于闭合,苍蝇早就感到危险飞走了。为了超越液体在植物组织中较慢流速带来的动作限速,捕蝇草利用了与雨伞会被风刮翻同样的物理学原理。
查尔斯·达尔文在他1875年的著作《食虫植物》(Insectivorous Plants)中描述了捕蝇草捕虫叶瓣的形态特点:打开时,叶瓣凸出(向外弯曲);闭合时,叶瓣凹进(向内弯曲)(图2)。虽然叶瓣张开时的状态是力学稳定的,但此时的叶瓣也处于一个弹性不稳定的临界点。当昆虫的造访刺激了叶瓣上的触毛,叶瓣的一面会体积增大。
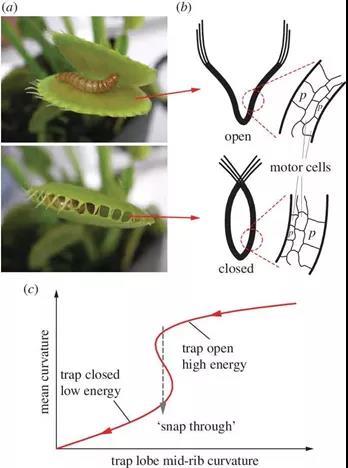
图2 捕蝇草叶瓣开闭 图源:Fluidic origamiwith embedded pressure dependent multi-stability: A plant inspired innovation, September2015, Journal of The Royal Society Interface 12(111) DOI:10.1098/rsif.2015.0639 Flytrap photo credit:Beatrice Murch (www. ).
哈佛大学的L Mahadevan研究团队在2005年使用高速摄像机记录下了叶面伸展使捕蝇草叶瓣超过稳定界限的过程:原本向内凸起的叶瓣突然反向弯曲,在零点几秒之内快速闭合——就像是一阵大风把雨伞吹得向上翻起来,使它从一个稳定的几何构型变到了另一个[3] 。今日的工程师们利用这种被称为 “跃越失稳”(snap-through buckling instability) 的现象来设计一些精密结构,不过这样来看,捕蝇草早已领先一步。
夺命转盘
相比之下,捕蝇草的水生近亲,囊泡貉藻(Aldrovanda vesiculosa)是一种罕为人知的食虫植物,它的运动机制也非常有趣。囊泡貉藻原产自亚洲、澳洲、欧洲和非洲的淡水水体中,是一种水生入侵植物。和捕蝇草类似,它也拥有两片像夹子一样、能够快速闭合的捕虫叶瓣和感受刺激的触毛。这些叶瓣缺少铰链结构,这让它们看起来像吃豆人游戏中的主角(图3)。囊泡貉藻的捕虫叶在茎上轮状排列,它因此得到了 “水轮”(waterwheel)的英文俗名。
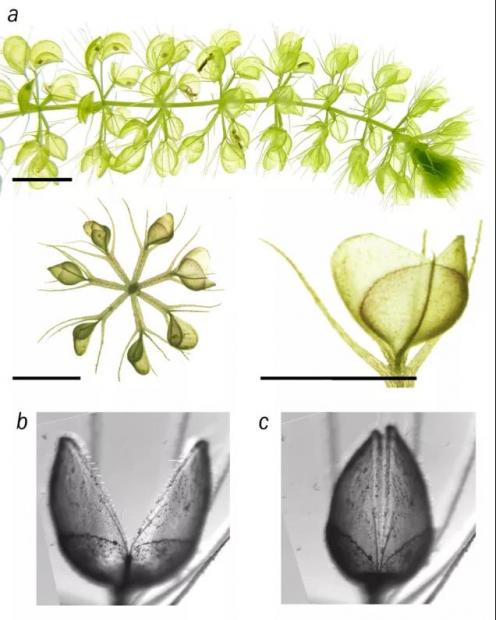
图3 神奇“水轮” | 图源:Taken from Proc. Royal Society B 10.1098/r spb.2018.0012; reused with permission; cour tesy Plant Biomechanics Group
a 囊泡貉藻生活在水中,因叶子在茎上轮生而得名“水轮”。每片叶子顶端特化出一个可以打开(b)或闭合(c)的捕虫夹,当有昆虫进入,捕虫夹会突然关闭,把猎物困在其中。通过运动学放大,捕虫夹两个叶瓣的连接处产生的微小形变,能够导致叶瓣末端做出大得多的动作。囊泡貉藻的捕虫夹在打开时也一直处于一个预应力的状态,这有助于给叶瓣闭合的动作进一步提速。
和同科姐妹捕蝇草一样,对于囊泡貉藻来说,如果只靠液压传动,它的运动速度也赶不上水螨、孑孓等猎物逃跑的速度。为了捕虫,囊泡貉藻利用了 “运动学放大”(kinematic amplification) 的原理——整体结构中,某部分的发生的较小有限运动,可以在另一处引起大的位移。门的开关便是运动学放大的最简单例子:轻碰远离转轴的门把手,就能很容易地把门推开;但如果在靠近转轴的一端发力,则要用更大的力气才能把门打开到同样的程度。
德国弗莱堡大学由 Anna Westermeier 带领的研究团队于2018年观察到,囊泡貉藻利用液压在捕虫夹的基部制造出一个微小的形变,使这部分结构变宽了几十微米。这么毫不起眼的形变在运动学放大的作用下被增加了约200倍,使囊泡貉藻能够在没有铰链的情况下闭合叶瓣,捕捉猎物。
捕虫夹在等待猎物时所保持的 “预应力”(pre-stress)状态也有助于囊泡貉藻实现快速运动。如同一个被紧紧压缩在狭小空间中的弹簧,此时的叶瓣储存了弹性势能,当动作被触发,弹性势能瞬间释放,加快了叶瓣闭合的速度 [4]。只要猎物没有全都强壮到能把捕虫夹撬开,那么囊泡貉藻就不会有忍饥挨饿的一天。
黏液杀手
南非茅膏菜(Drosera capensis)产自南非好望角,也是一种令人着迷的食虫植物。它的叶子又细又长,表面布满了颜色鲜艳、如同触手一般的精致腺毛,每根腺毛的顶端都分泌出一滴有黏性的透明液珠。当昆虫落在叶子上时,便会被黏住,细长的叶子还会向内卷起,把猎物黏得更牢,也让更多的腺毛与虫体接触,使茅膏菜能够尽最大可能消化猎物、摄取养分。
茅膏菜属的植物曾令达尔文如此入迷,以至于他曾自称 “关心茅膏菜,更甚于世界上所有物种的起源”。即使如此,茅膏菜叶片的运动机制却一直是一个谜。直到2019年,由米兰大学 Caterina La Porta 和 Stefano Zapperi 领导的跨学科合作项目才终于给出了答案。这项研究向世人展示了茅膏菜叶片奇特运动的全部力学机制和背后的生化信号传导途径,笔者有幸为研究团队的一员。
在光学显微镜下,研究者们发现南非茅膏菜叶片上下表面的细胞形状有所不同。叶片下表面的细胞比较细长,且方向和叶片长轴平行;相比之下,上表面的细胞形状则更接近圆形。当茅膏菜的叶子受到刺激——比如有一只飞虫降落到叶面,或者是滴上一滴牛奶(实验中我们向茅膏菜施加刺激的方法)——和上文中的捕蝇草和囊泡貉藻一样,茅膏菜会改变叶片细胞的内部压力,继而使细胞发生形变。
想象一只气球被吹起,它膨胀起来的样子大致取决于自己充气前是什么形状:圆的气球吹起来仍是圆的,长的气球不会变圆,只会被吹得更长。茅膏菜叶片表面的细胞也像气球一样,因压力改变而涨大时,上表面的细胞仍保持近圆形,下表面的长条细胞则会伸展得更长。这样一来,叶片上下表面扩展的方向和速率就不同步了,这导致叶子的几何构型改变,下表面长于上表面,叶子因此绕着被黏住的昆虫卷曲起来,把猎物束缚得插翅难逃。
当我们看清南非茅膏菜叶片表面的微观构造,就会明白它的弯曲能力是由这些细胞结构所注定的,是这些结构将同种的生化信号转变为叶片上下表面的不对称反应。受到南非茅膏菜叶片卷曲动作的启发,我们的合作团队把这一发现迁移到了软机器人领域,因为人造手需要对特定的输入信号做出可预测的反应:需要根据刺激做出指定动作。因此,我们决定以茅膏菜叶子表面的不同细胞结构为灵感,设计新型人造超材料。
我们采用一种普通常见的塑料,制造出了能够重现南非茅膏菜卷曲叶片动作的双层结构(图4)。这种双层结构的上层由一个六条边的沙漏形状重复、嵌合组成,在受到拉伸时厚度增加(即泊松比(Poisson's ratio)为负)。下层的结构大致相同,只是在每个沙漏形状的细腰处多了一段连接两个角的塑料,受到同样的拉伸时则能够变薄(即泊松比为正)。
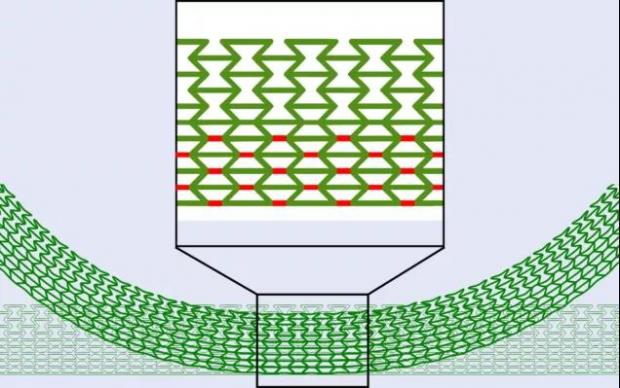
图4 受压卷曲 | 图源:Daniel Rayneau-Kirkhope
受到南非茅膏菜叶片卷曲包裹住猎物的动作方式的启发,作者所在的研究团队设计制造出图中的双层栅格结构。如放大图所示,结构的上层由许多沙漏形单元相互镶嵌而成,下层的单元则比上层的多了一条边(放大图中标红的部分),把沙漏形分成了两个等腰梯形。当结构的两端受到挤压,它便会往上卷起,就如同茅膏菜受到刺激的叶片。在软机器人领域,具有该结构的材料可用于义肢的设计,使其能够像真正的人手一样活动。
这种新型双层结构容易生产,且有着很大的应用空间。计算机模拟显示,如果增加沙漏形单元格内的气压,我们的材料能够从初始的平整状态自发地卷曲成一个圆圈,就像它所模仿的茅膏菜叶片一样。此外,我们还发现从两端施加压力,该材料也能够卷起,最终达到同样的圆圈状态。也就是说,让这种无铰链结构卷曲起来的方式不止一种。
如今,已经不难想象这样的软材料——在结构中就蕴含着 “动机”。它的出现将取代以往常见的僵硬机械关节,让机器人的手指、手臂拥有柔性,可根据情况来弯曲和伸直。对这样的软机器人来说,牢固地抓握杯盘碗碟等易碎物品而又不捏碎它们就是小菜一碟。操纵这样的机器人也就不再需要那么高的运算能力,也不需要那些为了避免机器人在抓握的过程中损坏物体而设置的复杂的反馈环路。
仿生未来
从根据超疏水的荷叶表面造出的自清洁窗户,到受豪猪刺启发的外科手术缝合钉,科学家和工程师们从自然界找到了越来越多的设计灵感。但研究者不会止步于单纯地模仿动植物来制造机械,而是力求在理解这些结构原理的基础上,将其与现代化的材料工程相结合,设计出新一代的仿生机器。
仿生学的妙处在于,大自然已经向我们证明了它的可靠性。地球上的生命经历了亿万年的考验,那些不成功的方案早已被淘汰出局:如果植物无法从环境中获取生命所需的营养,它就面临死亡的危险;如果种子的散播方式不够有效,这个物种就会逐渐走向灭绝。惊叹于人类拇指精巧构造的牛顿,若是看到未来以植物运动为灵感设计的机械手,不知会作何感想呢?
原文链接:
▲ 本文为Physics World 专栏的第44篇文章。
版权声明
原文标题 “Replicating how plants move ”,首发于2021年7月出版的 Physics World,英国物理学会出版社授权《知识分子》翻译。本译文有删节,中文内容仅供参考,一切内容以英文原版为准。未经授权的翻译是侵权行为,版权方将保留追究法律责任的权利。登陆 Physics World,关注日常全球科学新闻、热点报道和评论。Physics World 帮助学界与产业界的研究人员走在世界重大科研突破与跨学科研究的前沿。
参考文献:
[1]
[2]
[3]
[4]
[5]
话题:

0
推荐
财新博客版权声明:财新博客所发布文章及图片之版权属博主本人及/或相关权利人所有,未经博主及/或相关权利人单独授权,任何网站、平面媒体不得予以转载。财新网对相关媒体的网站信息内容转载授权并不包括财新博客的文章及图片。博客文章均为作者个人观点,不代表财新网的立场和观点。
 京公网安备 11010502034662号
京公网安备 11010502034662号 {kind=link}